وفقًا لقانون أوم ، يتسبب التيار الذي يمر عبر المقاوم في جهد على نهايات المقاومة. في أنظمة التحكم في الشحن ، يتم قياس التيار عن طريق قياس الجهد على المقاومات عن طريق توصيل سلسلة من المقاومات بالقرب من الصفر في طريق التمرير الحالي. نظرًا لأن الطاقة الناتجة تساوي قيمة مربع التيار وقيمة المقاومة ، فإن قيم المقاومة المنخفضة جدًا قد أبقت القدرة المحولة إلى الحرارة على المقاومة عند قيم منخفضة جدًا. ومع ذلك ، نظرًا لأن الجهد الناتج عن صياغة V = I x R هو أيضًا على مستوى عمود الدوران ، فهي أيضًا شديدة الحساسية للأخطاء أثناء التصميم. تتضمن منهجية قياس كلفن الحالية معايير تصميم لتقليل معدل الخطأ في القياس الحالي.
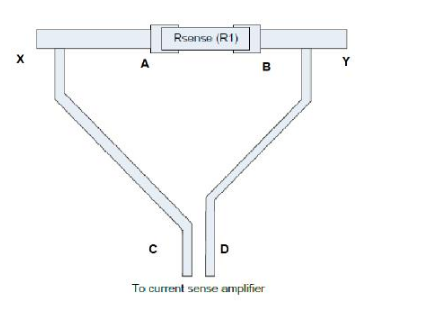
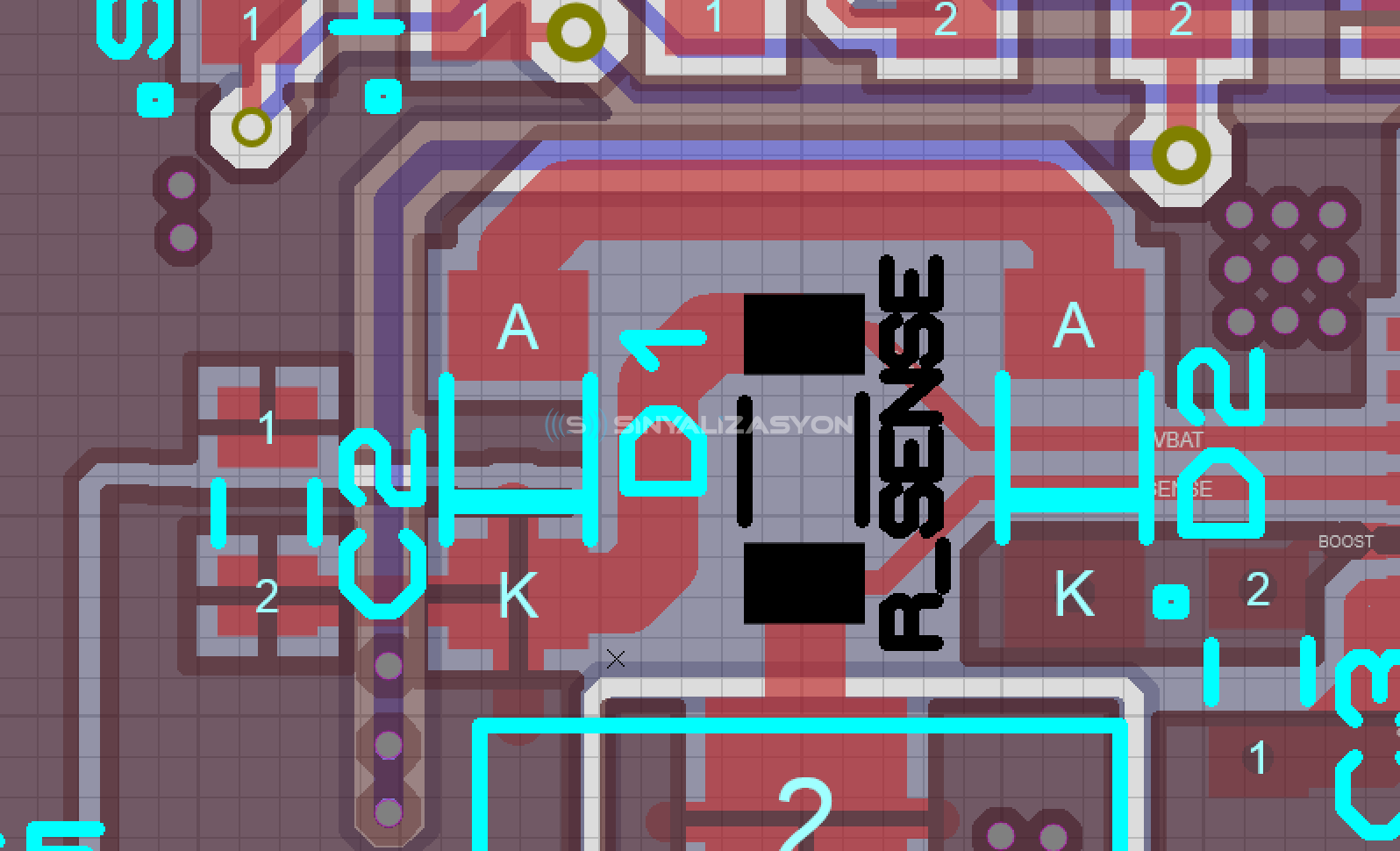
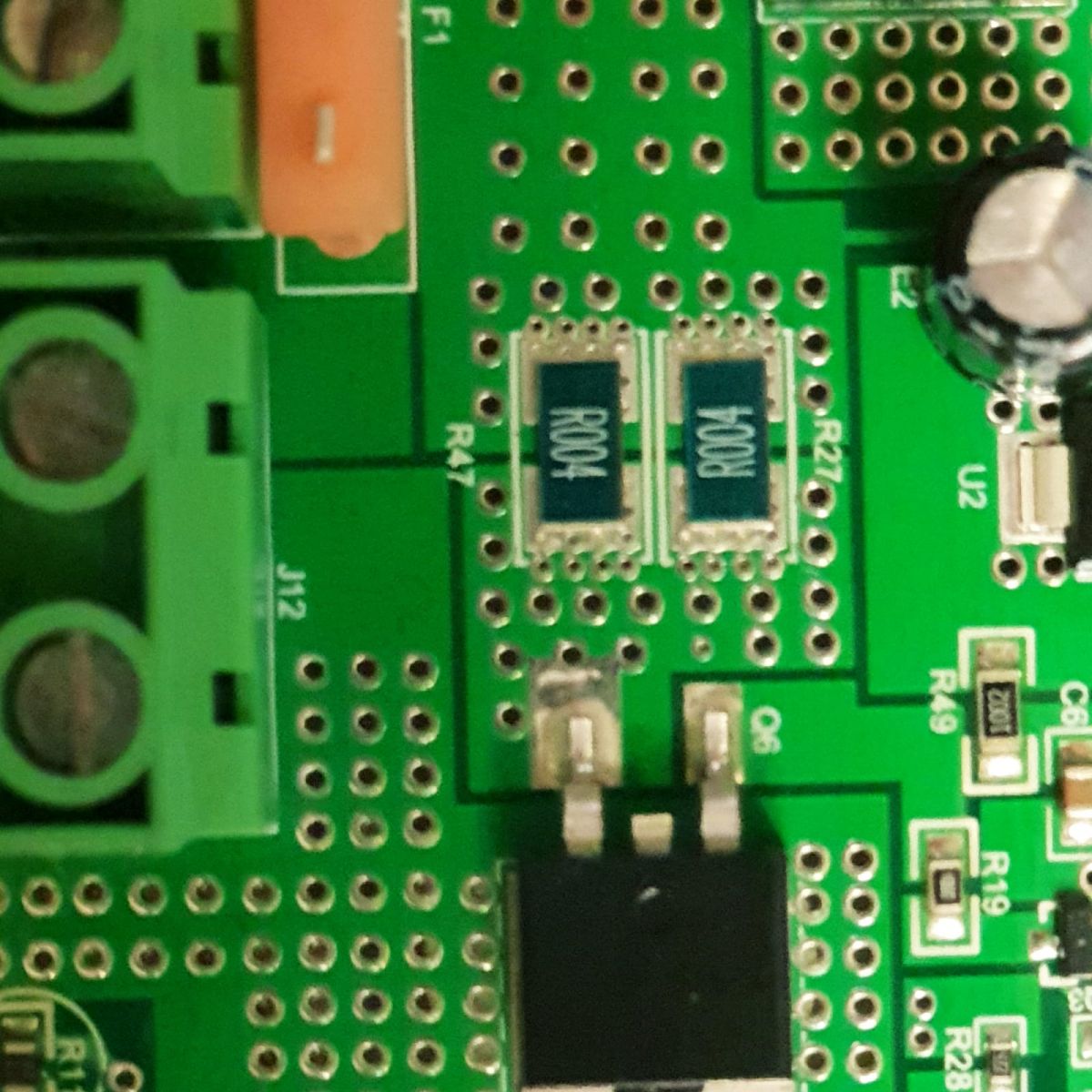
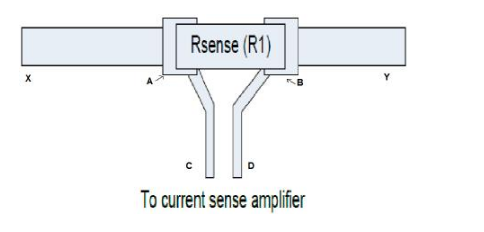
يهدف مقياس كلفن إلى قياس تأثير مقاومة التلامس عند نقطة حالية أو مرجعية تتطلب الدقة. يقرأ حساس كيلفن جهدًا صغيرًا على المقاوم بقيمة 0.01-0.1 درجة مئوية ، والذي ينخفض وفقًا لقيمة التيار المار. يجب توصيل خطوط مقياس Kelvin مباشرة بمقاومة Rsense. ستؤدي المقاومة الإضافية التي يجب إجراؤها بواسطة أي تصميم خاطئ إلى فقد الجهد الإضافي وستؤدي إلى قياسات غير صحيحة. النقطتان A و B الموضحتان في الشكلين 1 و 2 أدناه هي منصات Rsense ، و C و D هما مدخلات دبوس الحساس Kelvin.
مثال على التصميم الصحيح في الشكل - 1.
الشكل 2 مثال للتصميم الخاطئ. إذا كنت تريد قراءة 100mV من خطوط الإحساس ، فستكون هناك خسارة في الجهد تقل عن 100mV مع فقدان الجهد من الفرق بين A-X و B-Y على Rsense. سيؤدي ذلك إلى قراءة أقل من القيمة الفعلية للتيار المراد قياسه.